
はじめに
RaspberryPi Pico WでMicroPythonを使って、Bluetooth(BLE)のセントラルを作る方法を解説します。
コードはPico Wの公式の記事で紹介されている、公式チュートリアルのものを使用、より詳細かつ、分かりやすくした内容を、日本語で解説していきます。
チュートリアルには以下の3つのコードが載っていますが、今回は「③ Pico WをBLEのセントラルにするコード」の解説です。
チュートリアルのコードを見て「これどういう意味?」と思った方はぜひご覧ください。
「そもそもBLEの仕組みが分からない」という方は、こちらのBLEペリフェラルの作り方の記事で解説しています。先にそちらの記事を見てみてください。
注意:今回のプログラムを動作させるには、Pico Wが2つ必要です。
| No. | 内容 | ファイル名 |
| 1 | BLE用のユーティリティ | ble_advertising.py |
| 2 | Pico WをBLEのペリフェラルにする | picow_ble_temp_sensor.py |
| 3 | Pico WをBLEのセントラルにする | picow_ble_temp_reader.py |
~ この記事の内容 / Contents ~
環境
この記事で使用する環境は以下の通りです。
| 環境 | バージョンなど | 備考 |
| 開発用PCのOS | Windows11 | Windows10でもOKです |
| 言語 | MicroPython | |
| 開発環境 Thonny | 4.0.2 | |
| ボード | RaspberryPi Pico | 注意:今回は2つ必要です |
| ファームウェア | micropython-firmware-pico-w-130623.uf2 |
RaspberryPiとの接続
Pico W 本体の温度センサを使用します。部品や回路をつなぐ必要はありません。
使用する部品
Pico W 本体
Raspberry Pi Pico W本体です。技適対応品かどうか心配…という方は、以下のページで出品者を「共立エレショップAセレクト」(国内の有名ショップ)にして購入してください。

今回のプログラムを動かすには、セントラル用・ペリフェラル用で、Pico Wが2つ必要になります。
USBケーブル Micro-B
本体にUSBケーブルが付属していないので、別途購入が必要です。PicoW側の形状は「Micro-B」、ひと昔前のスマホと同じタイプを使います。現在主流のTypeCではないので注意が必要です。

プログラム概要
今回のプログラムの概要は以下の通りです。
ペリフェラル編の記事で作成した、ペリフェラルのPico Wに、BLEセントラルのPico Wをもう1つ作って接続します。
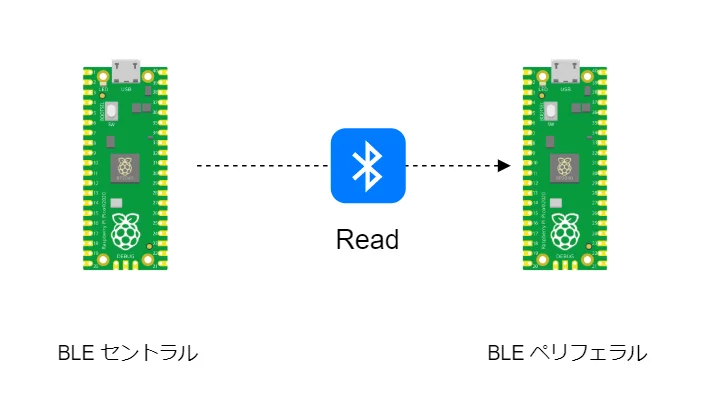
- Pico WをBLEのセントラルとして設定する
- ペリフェラルのPico Wと接続する。
- ペリフェラルの温度センサの値をReadする。
- ペリフェラルの温度センサの値を表示する。
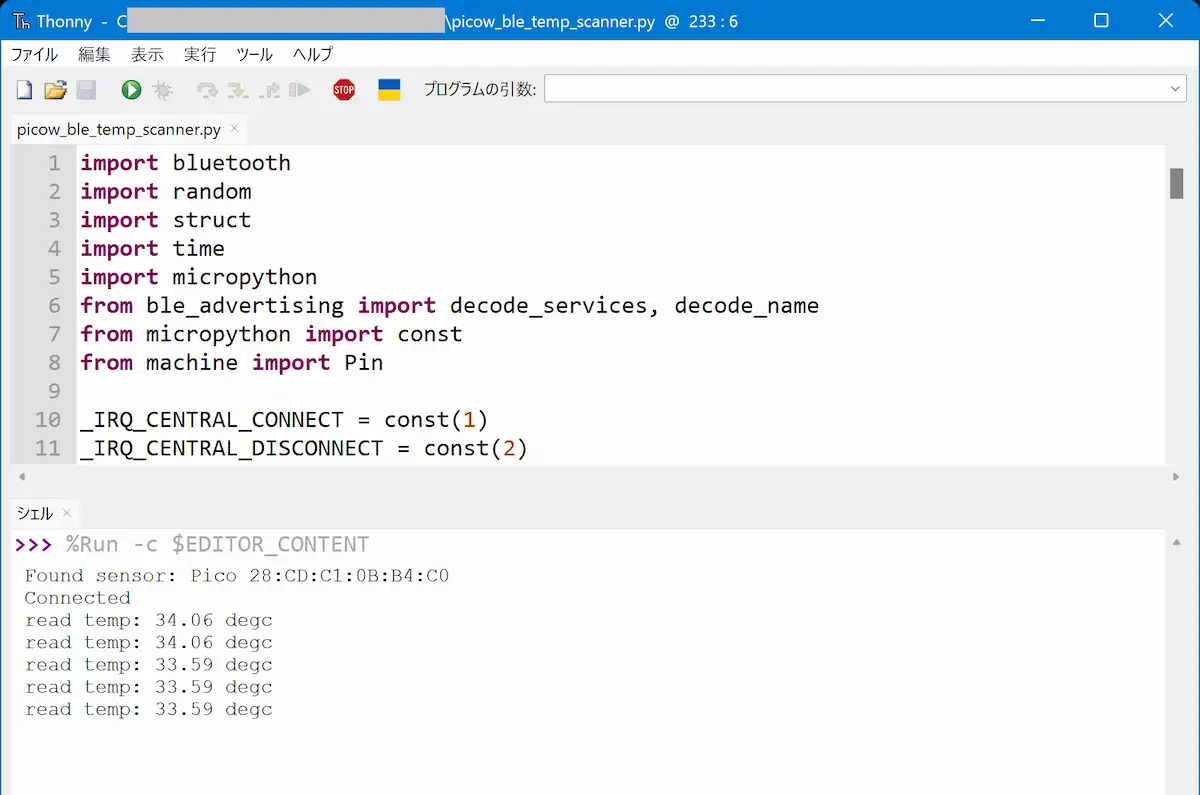
実行結果
後述するプログラムの実行結果は以下の通りです。
ファームウェアの更新
PicoWでBluetoothを使うには、最新のファームウェアが必要です。こちらの公式サイトのDLページからダウンロードして、セントラル・ペリフェラルのの両方のPicoWを更新してください。
いつも通り「BOOTSEL」を押して起動、ファイルをコピーするだけで更新できます。
初めて行う方は、こちらのnote記事(無料)に手順をまとめているので、リンク先をご覧ください。
全体コード
全体コードは以下の通りです。詳細な内容は後述する「コードのポイント」で解説します。
import bluetooth
import random
import struct
import time
import micropython
from ble_advertising import decode_services, decode_name
from micropython import const
from machine import Pin
_IRQ_CENTRAL_CONNECT = const(1)
_IRQ_CENTRAL_DISCONNECT = const(2)
_IRQ_GATTS_WRITE = const(3)
_IRQ_GATTS_READ_REQUEST = const(4)
_IRQ_SCAN_RESULT = const(5)
_IRQ_SCAN_DONE = const(6)
_IRQ_PERIPHERAL_CONNECT = const(7)
_IRQ_PERIPHERAL_DISCONNECT = const(8)
_IRQ_GATTC_SERVICE_RESULT = const(9)
_IRQ_GATTC_SERVICE_DONE = const(10)
_IRQ_GATTC_CHARACTERISTIC_RESULT = const(11)
_IRQ_GATTC_CHARACTERISTIC_DONE = const(12)
_IRQ_GATTC_DESCRIPTOR_RESULT = const(13)
_IRQ_GATTC_DESCRIPTOR_DONE = const(14)
_IRQ_GATTC_READ_RESULT = const(15)
_IRQ_GATTC_READ_DONE = const(16)
_IRQ_GATTC_WRITE_DONE = const(17)
_IRQ_GATTC_NOTIFY = const(18)
_IRQ_GATTC_INDICATE = const(19)
_ADV_IND = const(0x00)
_ADV_DIRECT_IND = const(0x01)
_ADV_SCAN_IND = const(0x02)
_ADV_NONCONN_IND = const(0x03)
# org.bluetooth.service.environmental_sensing
_ENV_SENSE_UUID = bluetooth.UUID(0x181A)
# org.bluetooth.characteristic.temperature
_TEMP_UUID = bluetooth.UUID(0x2A6E)
_TEMP_CHAR = (
_TEMP_UUID,
bluetooth.FLAG_READ | bluetooth.FLAG_NOTIFY,
)
_ENV_SENSE_SERVICE = (
_ENV_SENSE_UUID,
(_TEMP_CHAR,),
)
class BLETemperatureCentral:
# メンバを初期化して、bleのオブジェクトをアクティブにします。
def __init__(self, ble):
self._ble = ble
self._ble.active(True)
self._ble.irq(self._irq)
self._reset()
self._led = Pin('LED', Pin.OUT)
# メンバを空にします
def _reset(self):
self._name = None
self._addr_type = None
self._addr = None
self._value = None
self._scan_callback = None
self._conn_callback = None
self._read_callback = None
self._notify_callback = None
self._conn_handle = None
self._start_handle = None
self._end_handle = None
self._value_handle = None
#
# イベント発生時にライブラリから呼び出される関数です
#
def _irq(self, event, data):
#
# スキャンの結果
#
if event == _IRQ_SCAN_RESULT:
# アドバタイズの各種データを取得します
addr_type, addr, adv_type, rssi, adv_data = data
if adv_type in (_ADV_IND, _ADV_DIRECT_IND):
# アドバタイズのデータ内容をデコードします
type_list = decode_services(adv_data)
# スキャンしたペリフェラルが、Pico WのUUIDかどうかチェックします
if _ENV_SENSE_UUID in type_list:
# アドレスのタイプを取得します
self._addr_type = addr_type
#
# Bluetoothアドレスを取得します。データは変わることがあるので、
# 実体をコピー(deep copy)が必要です。
#
self._addr = bytes(addr)
# サービス名を取得します。
self._name = decode_name(adv_data) or "?"
# スキャンを停止します。
self._ble.gap_scan(None)
#
# スキャン完了
#
elif event == _IRQ_SCAN_DONE:
if self._scan_callback:
# Bluetoothアドレスが取得されている(タイムアウトではない)
if self._addr:
self._scan_callback(self._addr_type, self._addr, self._name)
self._scan_callback = None
# タイムアウト
else:
self._scan_callback(None, None, None)
#
# ペリフェラルへの接続成功
#
elif event == _IRQ_PERIPHERAL_CONNECT:
# dataの取得
conn_handle, addr_type, addr = data
# アドレスタイプ・MACアドレスがペリフェラルのPicoWと同じ
if addr_type == self._addr_type and addr == self._addr:
# 接続ハンドルを取得し、ペリフェラルのサービスを探します
self._conn_handle = conn_handle
self._ble.gattc_discover_services(self._conn_handle)
#
# ペリフェラルと切断した場合
#
elif event == _IRQ_PERIPHERAL_DISCONNECT:
# 切断したのが、接続していたペリフェアルだった場合
conn_handle, _, _ = data
if conn_handle == self._conn_handle:
# メンバ変数で保持していた、接続先の情報をリセットします
self._reset()
#
# ペリフェアルのサービスを取得
#
elif event == _IRQ_GATTC_SERVICE_RESULT:
# dataの取得
conn_handle, start_handle, end_handle, uuid = data
# ペリフェラルのPico WのサービスのUUIDと同じ場合
if conn_handle == self._conn_handle and uuid == _ENV_SENSE_UUID:
# スタートハンドルとエンドハンドルを取得する
self._start_handle, self._end_handle = start_handle, end_handle
#
# ペリフェアルのサービス取得が完了
#
elif event == _IRQ_GATTC_SERVICE_DONE:
if self._start_handle and self._end_handle:
# サービスの特徴(Characteristics)を取得する。
self._ble.gattc_discover_characteristics(
self._conn_handle, self._start_handle, self._end_handle
)
else:
print("Failed to find environmental sensing service.")
#
# ペリフェラルの特徴(Characteristic)を取得
#
elif event == _IRQ_GATTC_CHARACTERISTIC_RESULT:
#dataの取得
conn_handle, def_handle, value_handle, properties, uuid = data
# 特徴(Characteristics)のUUIDが、ペリフェラルのPicoWのUUIDと同じだったら。
if conn_handle == self._conn_handle and uuid == _TEMP_UUID:
# 特性のValueのATTへのハンドルを保持する。
self._value_handle = value_handle
#
# ペリフェラルの特徴(Characteristic)を取得完了
#
elif event == _IRQ_GATTC_CHARACTERISTIC_DONE:
# ペリフェラルのPicoWの特性情報を取得できていたら、
if self._value_handle:
if self._conn_callback:
# コールバック関数を呼び出します。
self._conn_callback()
else:
print("Failed to find temperature characteristic.")
#
# 特徴(Characteristic)へのReadの習得
# demo関数からRead実行後にイベントが発生します。
#
elif event == _IRQ_GATTC_READ_RESULT:
# dataの取得
conn_handle, value_handle, char_data = data
# Read元がPico Wであったら場合。
if conn_handle == self._conn_handle and value_handle == self._value_handle:
# 取得したデータで温度情報変換・表示・設定します。
self._update_value(char_data)
# コールバック関数が設定されていたら呼び出します。
if self._read_callback:
self._read_callback(self._value)
self._read_callback = None
# READが完了した場合
elif event == _IRQ_GATTC_READ_DONE:
# dataを取得します
conn_handle, value_handle, status = data
# ペリフェラルからNotifyが送られてきた場合
elif event == _IRQ_GATTC_NOTIFY:
# dataを取得します
conn_handle, value_handle, notify_data = data
# Readと同様に、接続済みのPico Wからの物であれば、
if conn_handle == self._conn_handle and value_handle == self._value_handle:
# 値を変換して表示します。
self._update_value(notify_data)
if self._notify_callback:
self._notify_callback(self._value)
def is_connected(self):
# ペリフェラルへの接続ハンドルと、特徴のValueのATTへのハンドルが取得済みであれば
# ペリフェラルへ接続していると判定します。
return self._conn_handle is not None and self._value_handle is not None
# アドバタイズしているペリフェラルをスキャンします
def scan(self, callback=None):
self._addr_type = None
self._addr = None
self._scan_callback = callback
self._ble.gap_scan(2000, 30000, 30000)
# スキャンで取得した情報で、ペリフェラルに接続します。
def connect(self, addr_type=None, addr=None, callback=None):
self._addr_type = addr_type or self._addr_type
self._addr = addr or self._addr
self._conn_callback = callback
if self._addr_type is None or self._addr is None:
return False
self._ble.gap_connect(self._addr_type, self._addr)
return True
# ペリフェラルと切断します
def disconnect(self):
if not self._conn_handle:
return
self._ble.gap_disconnect(self._conn_handle)
self._reset()
# Readを行います
def read(self, callback):
if not self.is_connected():
return
self._read_callback = callback
try:
self._ble.gattc_read(self._conn_handle, self._value_handle)
except OSError as error:
print(error)
# notifyが着た際のコールバックを設定します(未使用)
def on_notify(self, callback):
self._notify_callback = callback
# 温度情報の変換を行います
def _update_value(self, data):
try:
self._value = struct.unpack("<h", data)[0] / 100
except OSError as error:
print(error)
# メンバ変数Valueを取得する関数です
def value(self):
return self._value
# Pico本体のLEDを点滅させる関数です
def sleep_ms_flash_led(self, flash_count, delay_ms):
self._led.off()
while(delay_ms > 0):
for i in range(flash_count):
self._led.on()
time.sleep_ms(100)
self._led.off()
time.sleep_ms(100)
delay_ms -= 200
time.sleep_ms(1000)
delay_ms -= 1000
def print_temp(result):
print("read temp: %.2f degc" % result)
# 中心となる処理を行う関数です。
def demo(ble, central):
not_found = False
#スキャン完了時に呼び出して貰う関数です。
#ペリフェラルの名前を表示して、接続を行います。
def on_scan(addr_type, addr, name):
if addr_type is not None:
print("Found sensor: %s" % name)
central.connect()
else:
nonlocal not_found
not_found = True
print("No sensor found.")
# ペリフェラルのスキャンを行います。
central.scan(callback=on_scan)
# ライブラリ側が接続処理をしてくれるまで待ちます。
while not central.is_connected():
time.sleep_ms(100)
if not_found:
return
print("Connected")
# 接続が続いている間、ペリフェラルの温度の値を読み取ります。
while central.is_connected():
central.read(callback=print_temp)
sleep_ms_flash_led(central, 2, 2000)
print("Disconnected")
#メイン関数です
if __name__ == "__main__":
ble = bluetooth.BLE()
central = BLETemperatureCentral(ble)
while(True):
demo(ble, central)
sleep_ms_flash_led(central, 1, 10000)
コードのポイント
メイン処理
基本的にメイン処理側(main,demo)で実施することは少なく、スキャンを始めたら後は、ライブラリとIRQ関数内でほとんどの処理が行われます。
メイン側はそのライブラリとIRQの処理を待ったり、接続等が完了した後にReadの処理の実行のみをおこないます。
# 中心となる処理を行う関数です。
def demo(ble, central):
not_found = False
#スキャン完了時に呼び出して貰う関数です。
#ペリフェラルの名前を表示して、接続を行います。
def on_scan(addr_type, addr, name):
if addr_type is not None:
print("Found sensor: %s" % name)
central.connect()
else:
nonlocal not_found
not_found = True
print("No sensor found.")
# ペリフェラルのスキャンを行います。
central.scan(callback=on_scan)
# ライブラリ側が接続処理をしてくれるまで待ちます。
while not central.is_connected():
time.sleep_ms(100)
if not_found:
return
print("Connected")
# 接続が続いている間、ペリフェラルの温度の値を読み取ります。
while central.is_connected():
central.read(callback=print_temp)
sleep_ms_flash_led(central, 2, 2000)
print("Disconnected")
#メイン関数です
if __name__ == "__main__":
ble = bluetooth.BLE()
central = BLETemperatureCentral(ble)
while(True):
demo(ble, central)
sleep_ms_flash_led(central, 1, 10000)_irq関数
前述した通り、セントラル側の処理のほとんどはライブラリと、この_irq関数で行われます。メイン側からスキャンが実行されると、連続的にイベントが発生し_irq関数でイベントに応じた処理が行わるので、順番に解説していきます。
① スキャン結果
demo関数からscan関数が呼ばれ、gap_scan関数により、アドバタイズしているペリフェラルのスキャンが行われます。
ペリフェラルが見つかると「_IRQ_SCAN_RESULT」のイベントが発生し、IRQ関数内のこのIFブロックの処理が行われます。この際の引数「data」の内容は以下の通りです。
| 名称 | 内容 |
| addr_type | アドレスのタイプ |
| addr | Bluetoothアドレス |
| rssi | 電波強度 |
| adv_data | アドバタイズの情報のタプル |
#
# スキャンの結果
#
if event == _IRQ_SCAN_RESULT:
# アドバタイズの各種データを取得します
addr_type, addr, adv_type, rssi, adv_data = data
if adv_type in (_ADV_IND, _ADV_DIRECT_IND):
# アドバタイズのデータ内容をデコードします
type_list = decode_services(adv_data)
# スキャンしたペリフェラルが、Pico WのUUIDかどうかチェックします
if _ENV_SENSE_UUID in type_list:
# アドレスのタイプを取得します
self._addr_type = addr_type
#
# Bluetoothアドレスを取得します。データは変わることがあるので、
# 実体をコピー(deep copy)が必要です。
#
self._addr = bytes(addr)
# サービス名を取得します。
self._name = decode_name(adv_data) or "?"
# スキャンを停止します。
self._ble.gap_scan(None)
アドバタイズの種類
アドバタイズは以下の5つが存在しますが、その内「接続」ができるのは「0x00」「0x01」だけです。
チュートリアルのコードではPicoWと接続を行うため、IF文で接続できるものに絞り込んでいます。
if adv_type in (_ADV_IND, _ADV_DIRECT_IND):| 定数 | 定数名 | 説明 |
| 0x00 | ADV_IND | 接続/スキャン可能な無向アドバタイジング |
| 0x01 | ADV_DIRECT_IND | 接続可能な有向アドバタイジング |
| 0x02 | ADV_SCAN_IND | スキャン可能な無向アドバタイジン |
| 0x03 | ADV_NONCONN_IND | 接続不可能な無向アドバタイジング |
| 0x04 | SCAN_RSP | スキャン応答 |
※ 0x02,0x03はビーコンなどの「接続しない機器」で使われます。
デコードとデータの取得
「adv_data」内のUUIDを確認後、取得したデータをメンバ変数に保持します。
UUID・サービス名は「adv_data」のタプルで渡されますが、タプルの内容は通信のためbyte配列型のリトルエンディアンの形式となっています。そのためdecode_service関数を使ってデータを変換してから使用します。
MAC(Bluetooth)のアドレス情報「addr」は、ライブラリ内部のリングバッファに保持されており、別のイベントが発生すると中身が変わる可能性があります。そのため、参照のコピーではなく、実体のコピー(deep copy)で複製して使います。
取得が完了したら_ble.gap_scan関数でスキャンを停止(終了)させます。スキャンが停止すると「_IRQ_SCAN_DONE」が発生するので、次のイベント処理で対応します。
# アドバタイズの各種データを取得します
addr_type, addr, adv_type, rssi, adv_data = data
if adv_type in (_ADV_IND, _ADV_DIRECT_IND):
# アドバタイズのデータ内容をデコードします
type_list = decode_services(adv_data)
# スキャンしたペリフェラルが、Pico WのUUIDかどうかチェックします
if _ENV_SENSE_UUID in type_list:
# アドレスのタイプを取得します
self._addr_type = addr_type
#
# Bluetoothアドレスを取得します。データは変わることがあるので、
# 実体をコピー(deep copy)が必要です。
#
self._addr = bytes(addr)
# サービス名を取得します。
self._name = decode_name(adv_data) or "?"
# スキャンを停止します。
self._ble.gap_scan(None)
近くにPico以外のアドバタイズ機器がある場合、このイベントが機器の数だけ発生します。そのため、チュートリアルでは「adv_type」や「uuid」を使って、Pico Wからのイベントであることを確認しています。
② スキャンの完了
前述したセントラルでのスキャンの停止を行うと、「_IRQ_SCAN_DONE」イベントが発生します。
「_scan_callback」は関数ポインタ(関数を呼び出せる特別な変数のようなもの)で、メインのdemo関数内でon_scan関数がセットされています。
そのため「_scan_callback」に引数を付けて実行することで、on_scan関数が実行され、サービス名の表示と、ペリフェラルへの接続が行われます。
#
# スキャン完了
#
elif event == _IRQ_SCAN_DONE:
if self._scan_callback:
# Bluetoothアドレスが取得されている(タイムアウトではない)
if self._addr:
self._scan_callback(self._addr_type, self._addr, self._name)
self._scan_callback = None
# タイムアウト
else:
self._scan_callback(None, None, None)「_IRQ_SCAN_DONE」イベントは、スキャンがタイムアウトした場合も届きます。そのため、メンバ変数「_addr」が空かどうかで、スキャンに成功した(タイムアウトでない)ことを判定しています。
③ ペリフェラルの接続
前述したon_scan関数内でgap_connect関数が呼ばれると、「_IRQ_PERIPHERAL_CONNECT」イベントが発生します。渡されるdataの内容は以下の通りです。
| 名称 | 内容 |
| conn_handle | ペリフェラルへの接続ハンドル |
| addr_type | アドレスのタイプ |
| addr | Bluetoothアドレス |
Bluetoothのアドレス等で接続対象を確認し、接続したい相手が確認できた場合は_ble.gattc_discover_services関数を使って、ペリフェラルの持つサービスを取得します。
#
# ペリフェラルへの接続成功
#
elif event == _IRQ_PERIPHERAL_CONNECT:
# dataの取得
conn_handle, addr_type, addr = data
# アドレスタイプ・MACアドレスがペリフェラルのPicoWと同じ
if addr_type == self._addr_type and addr == self._addr:
# 接続ハンドルを取得し、ペリフェラルのサービスを探します
self._conn_handle = conn_handle
self._ble.gattc_discover_services(self._conn_handle)
④ ペリフェラルとの切断
ペリフェラルと切断された場合「_IRQ_PERIPHERAL_DISCONNECT」イベントが発生します。切断後はスキャンからやり直しになるので、メンバ等のリセットを行います。
#
# ペリフェラルと切断した場合
#
elif event == _IRQ_PERIPHERAL_DISCONNECT:
# 切断したのが、接続していたペリフェアルだった場合
conn_handle, _, _ = data
if conn_handle == self._conn_handle:
# メンバ変数で保持していた、接続先の情報をリセットします
self._reset()⑤ ペリフェラルのサービス取得結果
ペリフェラルの持つサービスの取得を行うと「_IRQ_GATTC_SERVICE_RESULT」イベントが発生します。「data」の内容は以下の通りです。
| 名称 | 内容 |
| conn_handle | ペリフェラルへの接続ハンドル |
| start_handle | 最初の特徴(Characteristic)のハンドル |
| end_handle | 最後の特徴(Characteristic)のハンドル |
| uuid | サービスのuuid |
引数により、サービスの持つ特性(Characteristic)の最初のハンドルと最後のハンドルを取得できます。この2つは後述する、サービスの特性(Characteristic)を取得する際に必要になるため、メンバ変数に保持します。
#
# ペリフェアルのサービスを取得
#
elif event == _IRQ_GATTC_SERVICE_RESULT:
# dataの取得
conn_handle, start_handle, end_handle, uuid = data
# ペリフェラルのPico WのサービスのUUIDと同じ場合
if conn_handle == self._conn_handle and uuid == _ENV_SENSE_UUID:
# スタートハンドルとエンドハンドルを取得する
self._start_handle, self._end_handle = start_handle, end_handle
接続したペリフェラルが複数のサービスを持つ場合、このイベントは複数発生します。そのためイベントを処理する際に、サービスのUUIDを使って使いたいサービスと一致しているかどうかの確認を行います。
⑥ ペリフェラルのサービス取得完了
全てのサービスの取得が完了すると「_IRQ_GATTC_CHARACTERISTIC_DONE」がイベントが発生します。
欲しい前述した「start_handle」「end_handle」をgattc_discover_characteristics関数に渡すことで、サービスの持つ特性(Characteristic)を取得します。
#
# ペリフェアルのサービス取得が完了
#
elif event == _IRQ_GATTC_SERVICE_DONE:
if self._start_handle and self._end_handle:
# サービスの特徴(Characteristics)を取得する。
self._ble.gattc_discover_characteristics(
self._conn_handle, self._start_handle, self._end_handle
)
else:
print("Failed to find environmental sensing service.")⑦ 特徴(Characteristic)の取得結果
前述のgattc_discover_characteristics関数により「_IRQ_GATTC_CHARACTERISTIC_RESULT」イベントが発生します。渡される「data」の内容は以下の通りです。
| 名称 | 内容 |
| conn_handle | ペリフェラルへの接続ハンドル |
| def_handle | 特性定義(Characteristic Definition)へのハンドル |
| value_handle | 特性の値(Characteristic Value)のATTへのハンドル |
| properties | 特性の定義(Characteristic Declaration)のATTに含まれる、特性プロパティ |
| uuid | 特性(Characteristic)のUUID |
接続ハンドルや特性(Characteristic)のUUIDで、対象の特性(Characteristic)がPico Wの物であることを確認し、ValueのATTへのハンドルを保持します。
値(Value)のATTには、文字通り、特性(Characteristic)の値が格納されています。ペリフェラル持つ温度情報を巣取得する場合い、このATTのハンドルが重要となってくるので、メンバ変数に保持します。
#
# ペリフェラルの特徴(Characteristic)を取得
#
elif event == _IRQ_GATTC_CHARACTERISTIC_RESULT:
#dataの取得
conn_handle, def_handle, value_handle, properties, uuid = data
# 特徴(Characteristics)のUUIDが、ペリフェラルのPicoWのUUIDと同じだったら。
if conn_handle == self._conn_handle and uuid == _TEMP_UUID:
# 特性のValueのATTへのハンドルを保持する。
self._value_handle = value_handle
サービスと同様に、特性(Characteristic)が複数ある場合も、イベントが複数発生するので、特性のUUIDを使って判定を行っています。
⑧ 特徴(Characteristic)の取得完了
全ての特性(Characteristic)の取得が完了すると「_IRQ_GATTC_CHARACTERISTIC_DONE」が発生します。
全ての特徴(Characteristic)を取得して、目的の特性がない場合を想定し「_value_handle」を取得しているかどうかで判定しています。
なお、コードでは「_conn_callback」の関数ポインタで、関数の呼び出しを行っていますが、「_conn_callback」の中身はNULLなので、関数を呼び出さずに終了します。
このイベントの処理で、スキャンから続いた一連のイベント処理は終了です。これ以降はメイン(demo)関数からの操作によって、イベント処理が発生します。
#
# ペリフェラルの特徴(Characteristic)を取得完了
#
elif event == _IRQ_GATTC_CHARACTERISTIC_DONE:
# ペリフェラルのPicoWの特性情報を取得できていたら、
if self._value_handle:
if self._conn_callback:
# コールバック関数を呼び出します。
self._conn_callback()
else:
print("Failed to find temperature characteristic.")
⑨ READの取得結果・取得完了
demo関数からread関数が呼ばれ、gattc_readが実行されると「_IRQ_GATTC_READ_RESULT」イベントが発生します。渡される「data」の内容は以下の通りです。
| 名称 | 内容 |
| conn_handle | ペリフェラルへの接続ハンドル |
| value_handle | 特性の値(Characteristic Value)のATTへのハンドル |
| char_data |
特性の値(Characteristic Value)のATTの値 |
Readした相手のvalue_handle等で確認し、PicoWのものと同じであれば「char_data」の保持を行います。
「char_data」は通信用に「byte配列型」「リトルエンディアン」「整数(小数点をなくすために100倍されている)」の状態であるため、_update_valueを使って小数点付の温度データに変換してからメンバ変数に格納します。
また、格納した温度データを「_read_callback」の関数ポインタ(print_temp関数)に渡すことで、関数が実行されて、小数点付の温度データがコンソール上に表示されます。
#
# 特徴(Characteristic)へのReadの習得
# demo関数からRead実行後にイベントが発生します。
#
elif event == _IRQ_GATTC_READ_RESULT:
# dataの取得
conn_handle, value_handle, char_data = data
# Read元がPico Wであったら場合。
if conn_handle == self._conn_handle and value_handle == self._value_handle:
# 取得したデータで温度情報変換・表示・設定します。
self._update_value(char_data)
# コールバック関数が設定されていたら呼び出します。
if self._read_callback:
self._read_callback(self._value)
self._read_callback = None
# READが完了した場合
elif event == _IRQ_GATTC_READ_DONE:
# dataを取得します
conn_handle, value_handle, status = data
# ~~~~~ 中略 ~~~~~
# Readを行います
def read(self, callback):
if not self.is_connected():
return
self._read_callback = callback
try:
self._ble.gattc_read(self._conn_handle, self._value_handle)
except OSError as error:
print(error)
⑩ NOTIFYの取得
ペリフェアルから通知(Nofifyが送信されると「_IRQ_GATTC_NOTIFY」イベントが発生します。渡される「data」の内容は以下の通りです。
| 名称 | 内容 |
| conn_handle | ペリフェラルへの接続ハンドル |
| value_handle | 特性の値(Characteristic Value)のATTへのハンドル |
| notify_data |
notifyで渡された、 |
取得内容や形式は、前述したREADイベントの結果取得と同じなので、Notifyのイベント時も同様に値を変換して、コールバック関数で表示を行います。
Notifyはペリフェアル側が発信してデータを送る処理なので、セントラルの側のメイン関数やdemo関数からのトリガとなる処理はありません。
しかし、ペリフェラル側のPico Wも10秒に1回Notifyを送るプログラムなので、10秒に1回程度このイベント処理のブロックが実行されます。
(Readの場合と同じコールバック関数を呼び出しているので、コンソールの表示では気づきにくいですが、デバッグプリントなどを仕込むと分かりやすいです)
# ペリフェラルからNotifyが送られてきた場合
elif event == _IRQ_GATTC_NOTIFY:
# dataを取得します
conn_handle, value_handle, notify_data = data
# Readと同様に、接続済みのPico Wからの物であれば、
if conn_handle == self._conn_handle and value_handle == self._value_handle:
# 値を変換して表示します。
self._update_value(notify_data)
if self._notify_callback:
self._notify_callback(self._value)
まとめ
RaspberryPi Pico WのBluetoothをMicroPythonで使う方法を解説しました。
BLEでは、サービスやキャラクタリスティックなど聞き慣れない言葉が多く、チュートリアルを見て混乱された方も多いんじゃないかと思います。
私もその内の一人でしたが、調べようにもPico WやMicroPythonでBLEを使う方法はかなり少なく大変だったので、今回の記事を作成してみました。
覚えたてかつ、調べながら作った記事ではありますが、Pico WのBLEの使い方で悩んでいる方の参考になればうれしいです。
分かりやすいサイト・書籍
BLEの解説として、とても「きれい」で「分かりやすく」解説されている記事を(勝手に)ご紹介します。BLEの基本的な仕組みが解説されているので、知識ゼロからチュートリアルを読み進める場合は、非常に役に立つありがたい記事です。
書籍は以下を使いました。BLEの大筋は上記みかんさんの記事で理解できますが、より細かい内容を確認したり、補完したい場合に使えます。

お知らせ
そぞらさんのRaspberryPi Pico Wの本が登場
RaspberryPi 界隈で有名、Xでもバズり中の「そぞら」さんがPico Wの本を出しました。
Pico Wを使って、電子工作やMicroPythonの文法、AI活用にいたるまでをゼロから学ぶことができるので、興味のあるかたはぜひご覧ください!

MicroPythonのプログラミングガイドブックが遂に発売!
このブログでよく使用している「MicroPython」の本が遂に発売になりました。
MicroPythonの言語仕様から、プログラミングの仕方までが”みっちり”学べます(笑)。
普段別言語で組み込み系の開発をしている人や、これからマイコンの学習が必要となってしまった(専門分野の)学生などを対象としているため、初心者用とはいきませんが、自前のライブラリの作成を目標にしているので、これ一冊で「ガッツリ」と使い方を学ぶことができます。
全ての内容はここでは紹介しきれないので、詳細は以下のAmazonページをご覧ください。目次だけでも圧巻の内容です。

Pico/Pico W関連のおすすめ本
RaspberryPi Pico / Pico W関連のおすすめ本を独断と偏見で3つ選んでみました。Picoやるならとりあえずこれ買っとけ的な本や、電子工作全般で使える本などを厳選しています。
質問・要望 大歓迎です
「こんな解説記事作って」「こんなことがしたいけど、〇〇で困ってる」など、コメント欄で教えてください。 質問・要望に、中の人ができる限り対応します。
使えたよ・設定できたよの一言コメントも大歓迎。気軽に足跡を残してみてください。記事を紹介したい方はブログ、SNSにバシバシ貼ってもらってOKです。



Pico W BLEセントラルを読ませていただきました。現在、Pi Zero2でOMRON環境センサ2JCIE-BU01のデータをロギングしていますが、Pico Wでデータを取得できれば省エネ化できると考えています。Pythonでデータを読み取る部分だけでもわかるとうれしいです。
ナカさん
コメントありがとうございます、えすです。
返信遅くなってすみません。
Bluetooth対応なので、PicoWでもいけそうですね。
ちょっと調べて見ますが、センサの価格が最大のネックになりそうです(汗)